行星减速机行星架输出机构的传动误差分析
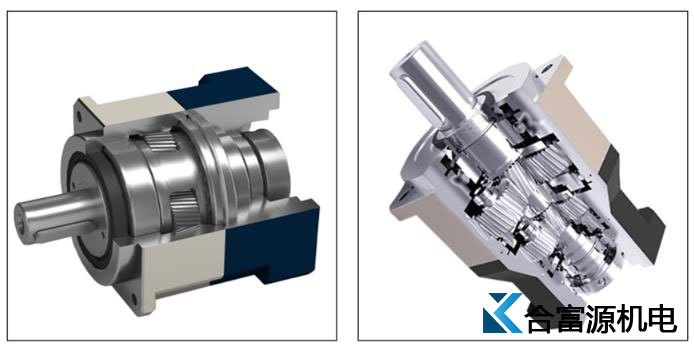
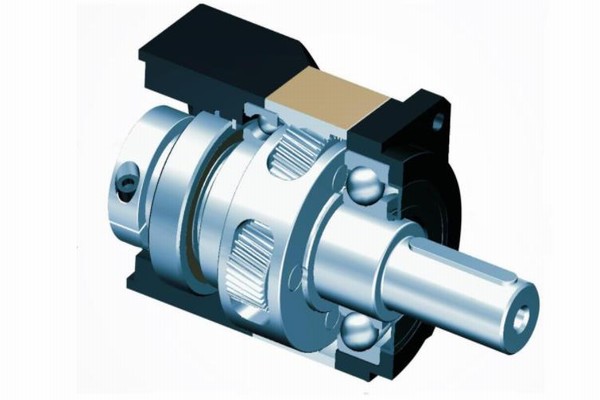
行星减速机的内部结构包括:连接板、联轴器、下盖板、太阳齿轮、行星轮、内齿圈、上盖板、行星架。其中行星架是呈一体化设计,合富源为您解析行星减速机行星架输出机构的传动误差。
行星减速机行星架输出机构的传动误差
1)理论上行星减速机的输出轴的转角适中与摆线轮的相等,但实际上,各构件杆长的制造偏差和链接副中的间隙,造成输出轴的转角会有误差;
2)由于这一机构为具有虚约束的单自由度并联机构,软件误差还与各种构件弹性条件相关,误差的精度分析必须在刚性误差分析的基础上;
3)考虑构件弹性条件后进一步求解,这是一个度非弹性问题,主要是考虑在缸体运动学范畴内机构的误差分析。
提高行星减速机齿轮轴承刚度的主要措施
由于轴承的刚度很小,而机器人对行星减速机体抗扭刚度又有很的要求,所以必须尽可能增大其他零件的刚度,以弥补轴承刚度的不足,主要有如下措施:
1)行星减速机的齿轮与齿轮咬合负移距与负等距组合修形,可以多齿啮合的共轭齿形,增大了行星减速机齿轮啮合的刚度;
2)针齿不用两支点而是用半埋齿以消除其弯曲变形;输出轴采用刚性尽可能大的大直径圆盘输出;
3)刚度实验时,固定输入轴,在输出轴上逐渐加载到额定转矩,测量出输出轴因零件弹性变形引起的转角值。用三角卡盘将输入轴固定在试验台上,针齿壳也与试验台固连。

