深圳中空旋转平台厂家:中空旋转减速机的齿轮机构
发表时间:2020-06-17
封闭行星机构的特点是 , 啮合封闭在齿轮系中 , 旋转一週后回到原来的位置 .

图 2.5 中所示的封闭啮合中 , 将成立的齿数分 别 设 为 z1、z2、z3 . 将图中的粗实线所示部分的长度除以齿轮的齿距 , 得出的数值为整数的话 , 此封闭啮合成立 .
公式 (2.11) 为啮合条件公式 :

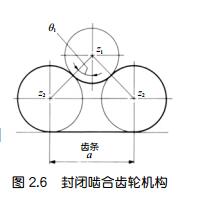
公式 (2.12) 为啮合条件公式 :

中空旋转平台减速机的齿数差很小的内齿轮与正齿轮通过适当的变位后可以避免干涉的发生 . 设中空旋转平台减速机内齿轮的齿数 z2 =50,齿数差由 1 到 8 的齿轮要素 , 列于表 2.3.
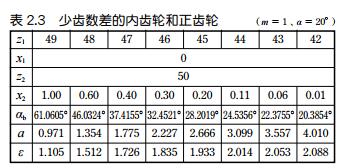
对于这些中空旋转平台减速机的齿轮 , 不会发生渐开曲线干涉与次摆线干涉 , 但是会发生齿形重叠干涉 .
所以 , 将中空旋转平台减速机齿轮移动至啮合位置时 , 需要沿轴方向进行移动 . 少齿数差的变位内齿轮做为少齿数差行星齿轮机构使用时 , 单级即可获得高传动比 . 此时的传动比为 :
图 2.4 中示意了 z1 = 30、z2 = 31 的齿数差为 1 的内齿轮与正齿轮的啮合 .
此时 , 中空轴旋转平台减速机传动比为 30

相关资讯15362679716